用Canny进行边缘检测 Canny 边缘检测是一种非常流行的边缘检测算法,是 John F.Canny 在1986 年提出的。1
2
3
4
5
6
7
import cv2
import numpy as np
img = cv2.imread("../lena.bmp" , 0 )
cv2.imwrite("canny.jpg" , cv2.Canny(img, 200 , 300 ))
cv2.imshow("canny" , cv2.imread("canny.jpg" ))
cv2.waitKey()
cv2.destroyAllWindows()
可见边缘检测的结果非常棒
Canny的工作原理略复杂,这里简单述说
- 高斯滤波器降噪(Gaussian filter)
由于边缘检测很容易受到噪声影响,所以第一步是使用 5x5 的高斯滤波器 去除噪声,这个前面我们已经学过了。
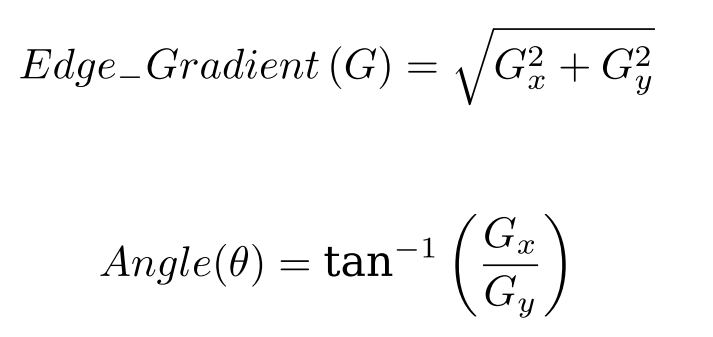
- 计算梯度(calculates gradients)
对平滑后的图像使用 Sobel 算子计算水平方向和竖直方向的一阶导数(图像梯度)(Gx 和 Gy)。根据得到的这两幅梯度图(Gx 和 Gy)找到边界的梯 度和方向,公式如下
梯度的方向一般总是与边界垂直。梯度方向被归为四类:垂直,水平,和两个对角线。
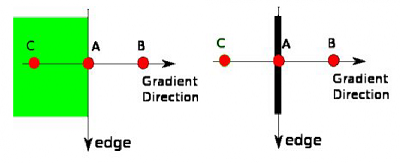
非极大值抑制(Non-maximum suppression)
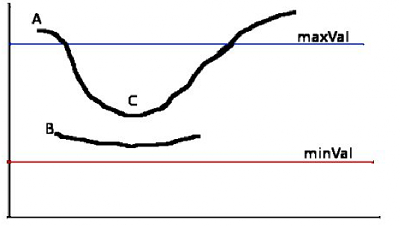
双阀值的边缘检测防止误判( a double threshold on all the detected edges to eliminate false positives)
分析所有边和和他们相连的边,去掉虚边,保留实边轮廓检测
轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度。轮廓在形状分析和物体的检测和识别中很有用。
为了更加准确,要使用二值化图像。在寻找轮廓之前,要进行阈值化处理或者 Canny 边界检测。
查找轮廓的函数会修改原始图像。如果你在找到轮廓之后还想使用原始图像的话,你应该将原始图像存储到其他变量中。
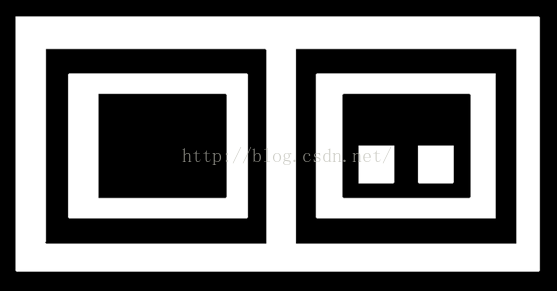
在 OpenCV 中,查找轮廓就像在黑色背景中超白色物体。你应该记住,要找的物体应该是白色而背景应该是黑色。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
import cv2
import numpy as np
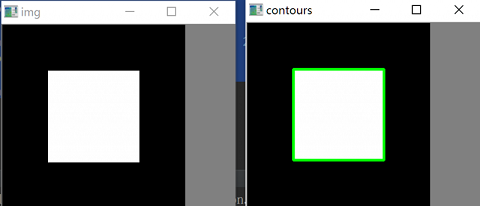
img = np.zeros((200 , 200 ), dtype=np.uint8)
img[50 :150 , 50 :150 ] = 255
ret, thresh = cv2.threshold(img, 127 , 255 , 0 )
cv2.imshow("img" , img)
image, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
color = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
img = cv2.drawContours(color, contours, -1 , (0 , 255 , 0 ), 2 )
cv2.imshow("contours" , color)
cv2.waitKey()
cv2.destroyAllWindows()
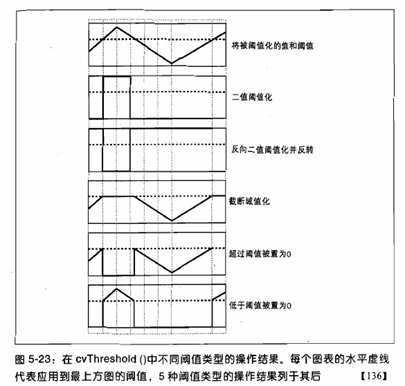
cv2.threshold: 作用:阀值处理;
cv2.THRESH_BINARY
cv2.THRESH_BINARY_INV
cv2.THRESH_TRUNC
cv2.THRESH_TOZERO
cv2.THRESH_TOZERO_INV
cv2.findContours 作用:寻找轮廓
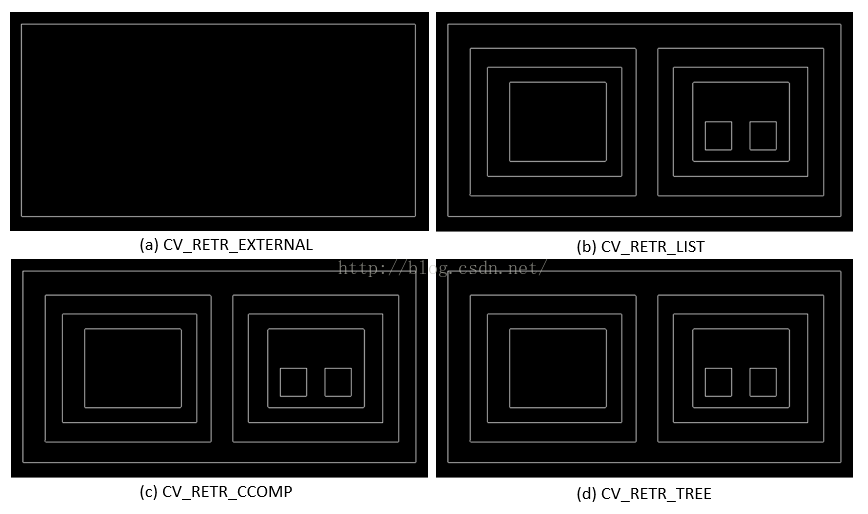
cv2.RETR_TREE 检索整个层次结构图像的轮廓,使您能够建立轮廓之间的“关系”。在你想完全消除两个相同轮廓的时候很有用。(在绝大多数情况下,你不需要检测一个物体在另一个具有相同类型的对象的里面)
CV_RETR_EXTERNAL 只检测出最外轮廓即c0。
CV_RETR_LIST 检测出所有的轮廓并将他们保存到表(list)中
CV_RETR_COMP 检测出所有的轮廓并将他们组织成双层的结构
CV_RETR_TREE 检测出所有轮廓并且重新建立网状的轮廓结构轮廓近似方法(contour approximation method)
CHAIN_CODE 用freeman链码输出轮廓,其他方法输出多边形(顶点的序列)。
CHAIN_APPROX_NONE将链码编码中的所有点转换为点。也就是参数contours中的每个轮廓是用构成该轮廓的所有像素点表示的。
CHAIN_APPROX_SIMPLE压缩水平,垂直或斜的部分,只保存最后一个点。也就是说参数contours中的每个轮廓是用该轮廓的所有顶点表示的。
CHAIN_APPROX_TC89_L1,CV_CHAIN_QPPROX_TC89_KCOS使用Teh-Chin链逼近算法中的一个。
LINK_RUNS与上述的算法完全不同,连接所有的水平层次的轮廓。cv2.drawContours
image,//要绘制轮廓的图像
contours,//所有输入的轮廓,每个轮廓被保存成一个point向量
ontourIdx,//指定要绘制轮廓的编号,如果是负数,则绘制所有的轮廓
color,//绘制轮廓所用的颜色
thickness=None //绘制轮廓的线的粗细,如果是负数,则轮廓内部被填充
lineType=None, /绘制轮廓的线的连通性
hierarchy=None,//关于层级的可选参数,只有绘制部分轮廓时才会用到
maxLevel=None//绘制轮廓的最高级别,这个参数只有hierarchy有效的时候才有效
//maxLevel=0,绘制与输入轮廓属于同一等级的所有轮廓即输入轮廓和与其相邻的轮廓
//maxLevel=1, 绘制与输入轮廓同一等级的所有轮廓与其子节点。
//maxLevel=2,绘制与输入轮廓同一等级的所有轮廓与其子节点以及子节点的子节点
offset=None
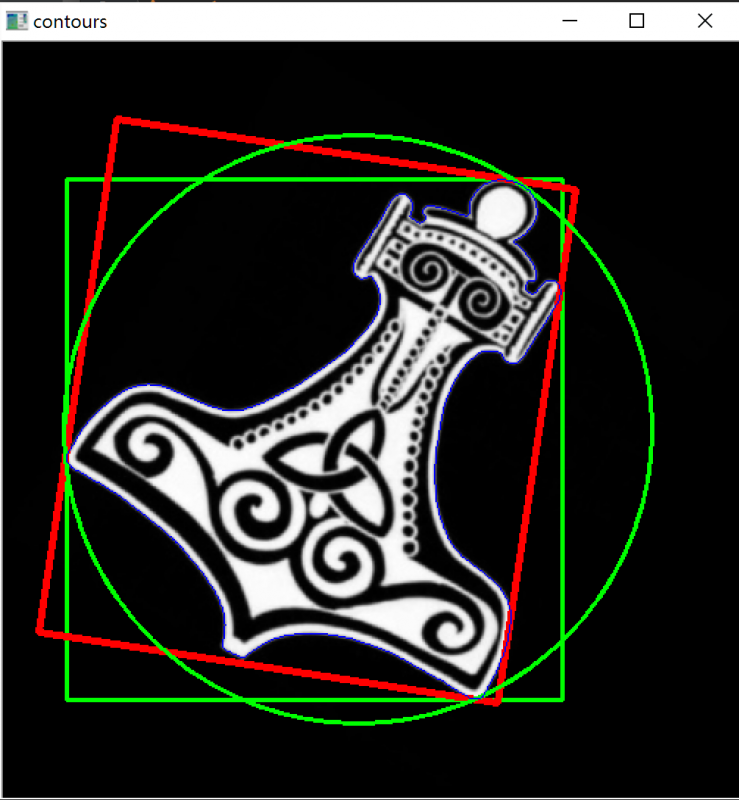
轮廓 –边界框,最小矩形区域和最小封闭圆 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
import cv2
import numpy as np
img = cv2.pyrDown(cv2.imread("hammer.jpg" , cv2.IMREAD_UNCHANGED))
ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY) ,
80 , 255 , cv2.THRESH_BINARY)
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
x,y,w,h = cv2.boundingRect(c)
cv2.rectangle(img, (x,y), (x+w, y+h), (0 , 255 , 0 ), 2 )
rect = cv2.minAreaRect(c)
box = cv2.boxPoints(rect)
box = np.int0(box)
cv2.drawContours(img, [box], 0 , (0 ,0 , 255 ), 3 )
(x,y),radius = cv2.minEnclosingCircle(c)
center = (int(x),int(y))
radius = int(radius)
img = cv2.circle(img,center,radius,(0 ,255 ,0 ),2 )
cv2.drawContours(img, contours, -1 , (255 , 0 , 0 ), 1 )
cv2.imshow("contours" , img)
cv2.waitKey()
cv2.destroyAllWindows()
轮廓——凸轮廓线(convex contours)和道格拉斯·皮克雷算法(Douglas-Peucker algorithm) 将轮廓形状近似到另外一种由更少点组成的轮廓形状,新轮廓的点的数目 由我们设定的准确度来决定。使用的Douglas-Peucker算法。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
import cv2
import numpy as np
img = cv2.pyrDown(cv2.imread("hammer.jpg" , cv2.IMREAD_UNCHANGED))
ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY) ,
80 , 255 , cv2.THRESH_BINARY)
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
cnt = contours[0 ]
img = np.zeros((img.shape[0 ], img.shape[1 ],3 ), dtype=np.uint8)
epsilon = 0.01 * cv2.arcLength(cnt, True )
approx = cv2.approxPolyDP(cnt, epsilon, True )
hull = cv2.convexHull(cnt)
cv2.drawContours(img, [approx], 0 , (0 ,0 , 255 ), 2 )
cv2.drawContours(img, [hull], 0 , (0 ,255 , 0 ), 2 )
cv2.drawContours(img, contours, -1 , (255 , 255 , 255 ), 1 )
cv2.imshow("done" , img)
cv2.waitKey()
线与圆形检测 线条和形状检测有其背后的理论基础在一种叫做Hough变换的技术,由Richard Duda 和 Peter Hart发明。
线段检测 HoughLines和HoughLinesP一个使用标准霍夫变换,另一个使用概率霍夫变换。通常,后者速度更快原理
所以如果一条线在原点下方经过,ρ 的值就应该大于 0,角度小于 180。 但是如果从原点上方经过的话,角度不是大于 180,也是小于 180,但 ρ 的值 小于 0。垂直的线角度为 0 度,水平线的角度为 90 度。 让我们来看看霍夫变换是如何工作的。每一条直线都可以用 (ρ, θ) 表示。 所以首先创建一个 2D 数组(累加器),初始化累加器,所有的值都为 0。行表 示 ρ,列表示 θ。这个数组的大小决定了最后结果的准确性。如果你希望角度精 确到 1 度,你就需要 180 列。对于 ρ,最大值为图片对角线的距离。所以如果 精确度要达到一个像素的级别,行数就应该与图像对角线的距离相等。 想象一下我们有一个大小为 100x100 的直线位于图像的中央。取直线上
的第一个点,我们知道此处的(x,y)值。把 x 和 y 带入上边的方程组,然后 遍历 θ 的取值:0,1,2,3,. . .,180。分别求出与其对应的 ρ 的值,这样我 们就得到一系列(ρ, θ)的数值对,如果这个数值对在累加器中也存在相应的位 置,就在这个位置上加 1。所以现在累加器中的(50,90)=1。(一个点可能 存在与多条直线中,所以对于直线上的每一个点可能是累加器中的多个值同时 加 1)。
现在取直线上的第二个点。重复上边的过程。更新累加器中的值。现在累加器中(50,90)的值为 2。你每次做的就是更新累加器中的值。对直线上的 每个点都执行上边的操作,每次操作完成之后,累加器中的值就加 1,但其他地方有时会加 1, 有时不会。按照这种方式下去,到最后累加器中(50,90)的 值肯定是最大的。如果你搜索累加器中的最大值,并找到其位置(50,90),这 就说明图像中有一条直线,这条直线到原点的距离为 50,它的垂线与横轴的 夹角为 90 度。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
import cv2
import numpy as np
img = cv2.imread('line.jpg' )
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50 , 150 , apertureSize=3 )
minLineLength = 3
maxLineGap = 200
lines = cv2.HoughLines(edges, 1 , np.pi / 180 , 200 )
for line in lines:
for rho, theta in line:
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a))
cv2.line(img, (x1, y1), (x2, y2), (0 , 0 , 255 ), 2 )
cv2.imshow("edges" , edges)
cv2.imshow("lines" , img)
cv2.waitKey()
cv2.destroyAllWindows()
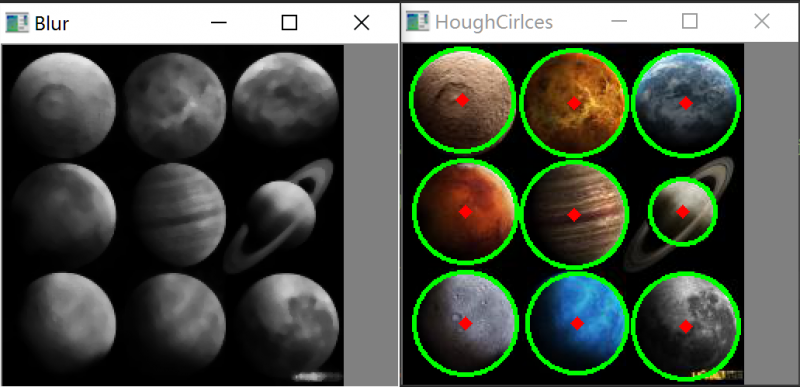
圆形检测 使用霍夫变换在图像中找圆形(环)。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
import cv2
import numpy as np
planets = cv2.imread('planet_glow.jpg' )
gray_img = cv2.cvtColor(planets, cv2.COLOR_BGR2GRAY)
img = cv2.medianBlur(gray_img, 5 )
cimg = cv2.cvtColor(img,cv2.COLOR_GRAY2BGR)
'''
cv2.HoughCircles(image, method, dp, minDist, circles, param1, param2, minRadius, maxRadius)
method:用于检测的方法,现在只有HOUGH_GRADIENT
dp:累加器分辨率:dp=1跟原图有同样的分辨率,dp=2分辨率是原图的一般
minDist:圆心到圆的最短距离
param1:First method-specific parameter。在HOUGH_GRADIENT里面,是Canny边缘检测较大的那个参数
param2:累加器在检测时候圆心的阀值。约小约容易检测到假圆
'''
cv2.imshow("Blur" , img)
circles = cv2.HoughCircles(img,cv2.HOUGH_GRADIENT,1 ,60 , param1=130 ,
param2=30 ,minRadius=0 ,maxRadius=0 )
circles = np.uint16(np.around(circles))
for i in circles[0 ,:]:
cv2.circle(planets,(i[0 ],i[1 ]),i[2 ],(0 ,255 ,0 ),2 )
cv2.circle(planets,(i[0 ],i[1 ]),2 ,(0 ,0 ,255 ),3 )
cv2.imwrite("planets_circles.jpg" , planets)
cv2.imshow("HoughCirlces" , planets)
cv2.waitKey